
 中文版
中文版 English
English

Copyright © 2003-2019 上海申岢動平衡機制造有限公司, All Rights Reserved 滬ICP備16012006號-5 友情鏈接:
上海動平衡機
24小時服務電話:135-8585-5377
搜索


新聞中心
News
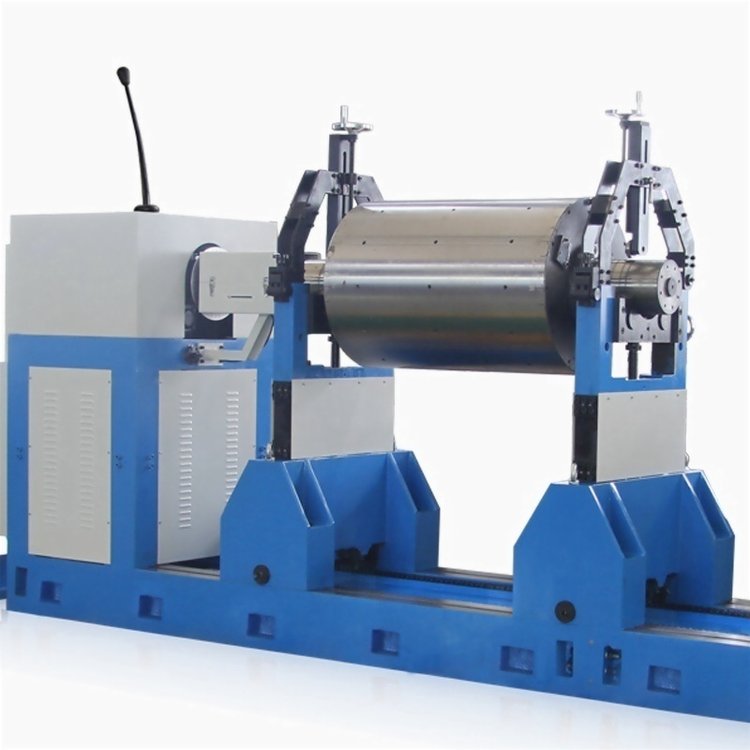
小型轉子平衡機操作步驟詳解
- 分類:公司新聞
- 作者:申岢編輯部
- 來源:上海申岢動平衡機制造有限公司
- 發布時間:2025-06-06
- 訪問量:47
小型轉子平衡機操作步驟詳解 一、設備預檢與環境校準 在啟動平衡機前,需完成三重驗證:
機械狀態篩查:檢查主軸軸承間隙、驅動電機散熱孔積塵及氣浮支承液位,確保無金屬碎屑殘留。 電氣系統激活:通過示波器監測傳感器信號波形,確認振動探頭靈敏度誤差≤0.5%,示值漂移率<0.3%。 環境參數鎖定:采用溫濕度記錄儀實時監控,要求操作間溫度波動<±2℃,相對濕度維持在45%-65%區間。 二、轉子安裝與動態對中 此階段需突破傳統剛性安裝思維,引入柔性定位策略:
三維定位法:使用激光跟蹤儀構建坐標系,將轉子軸心與平衡機主軸偏差控制在0.02mm以內。 動態平衡預判:通過頻譜分析儀捕捉啟動瞬間的振動頻譜,識別潛在的偶不平衡與力偶不平衡成分。 扭矩漸進加載:采用液壓扭矩扳手分三次施加預緊力(30%→60%→100%),避免螺栓過載導致的應力集中。 三、傳感器標定與數據采集 突破常規標定流程,實施多維度校準:
基準面重構:利用激光干涉儀生成虛擬基準面,消除安裝面形誤差對測量結果的干擾。 頻域交叉驗證:同步采集加速度傳感器(0.1-5kHz)與位移傳感器(0.01-1kHz)信號,通過小波變換實現頻帶互補。 噪聲抑制矩陣:構建自適應濾波器,對轉速相關的周期性干擾(如齒輪嚙合頻率)進行動態衰減。 四、平衡算法迭代與修正 引入智能優化策略突破傳統靜態平衡:
遺傳算法尋優:設定最大迭代次數200次,交叉概率0.8,變異概率0.1,自動搜索最優配重方案。 殘余振動分析:通過包絡解調技術提取軸承故障特征頻率,確保平衡后振動值<ISO 1940-1 G2.5標準。 動態補償機制:針對高速旋轉體(>10000rpm),啟用陀螺力矩修正模塊,補償角加速度引起的附加力矩。 五、殘余振動驗證與報告生成 構建多層級驗證體系確保結果可靠性:
頻譜對比分析:將平衡前后1X振幅降低率作為核心指標,要求降幅≥80%。 時域統計評估:計算振動信號RMS值、峰值因子及概率密度函數,生成三維云圖可視化殘余不平衡分布。 智能報告生成:采用LaTeX模板自動生成帶矢量圖的PDF報告,包含ISO 21940-11標準符合性聲明。 六、異常工況處理預案 針對突發狀況建立快速響應機制:
傳感器漂移補償:當測量值突變超過閾值(Δ>15%)時,自動觸發零點校準程序。 轉子失穩預警:通過峭度系數(Kurtosis>8)識別微弱裂紋,聯動安全離合器緊急制動。 數據篡改防護:采用區塊鏈技術對關鍵參數進行哈希加密,確保實驗數據不可篡改。 操作要點總結 本流程通過融合精密測量技術、智能算法與故障診斷理論,將傳統平衡精度提升至0.1g·mm量級。建議操作人員每季度進行盲樣測試,使用NIST標準轉子驗證系統重復性(RSD<3%),持續保持設備校準狀態。
上一個:
小型轉子平衡機校準注意事項
下一個:
小型轉子平衡機價格對比分析
上一個:
小型轉子平衡機校準注意事項
下一個:
小型轉子平衡機價格對比分析

